





NHKでは、多視点ロボットカメラを使って追従した被写体と、取得した映像情報を使って生成したCGを合成し、被写体の速度や軌跡として競技映像に表示できるシステムを開発している。ハイライトやスポーツ解説などで応用可能だという。
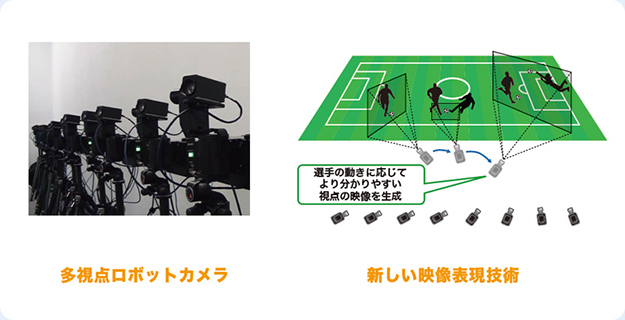
複数のロボットカメラを協調制御し、動く被写体の多視点映像を撮れる多視点ロボットカメラ

同社では5月に開催された「NHK技研公開2016」にて、その技術とフローを実演で紹介した。CBSのEyeVisionおよび元Replay TechnologiesのFreeD技術、Intel FreeDと類似した、スポーツ中継用リプレイ・グラフィックスが生み出せる。
© 2016 Replay Technologies, All Rights Reserved.
CBSが中継で採用したFreeDによる応用
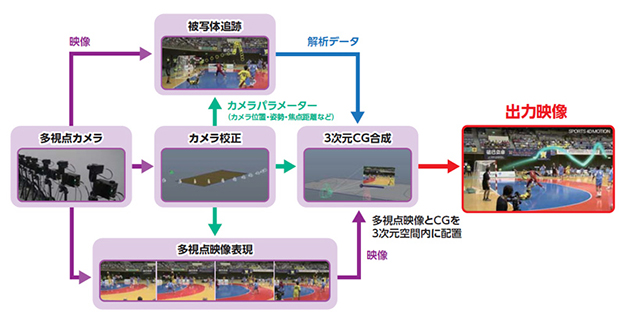
今回の実演では、マルチカメラのカメラ位置とポジションなどの情報や光学的な歪み補正などをリアルタイムで演算するカメラ校正技術と、映像解析による被写体の追従技術を組み合わせている。校正技術では、撮影現場で簡便にカメラの設定位置やポジションを高度に整合できるのが特長。

今回の実演では3台のカメラをシンクロして利用
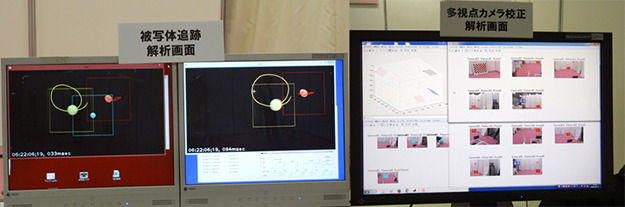
多視点映像からの被写体追従は、ボールや選手といった被写体の移動予測やマルチカメラ間の3次元的な位置関係を利用する

NHKでは、このような多視点ロボットカメラシステムを使った画期的なスポーツ中継向けのアプリケーションを、2020年の東京オリンピック・パラリンピック開催で実用したい意向だ。
(山下香欧)





















